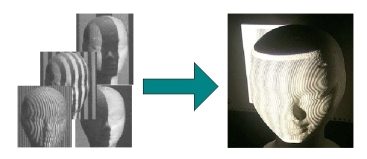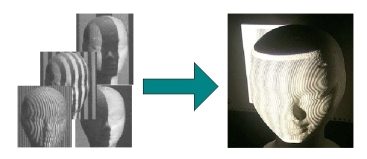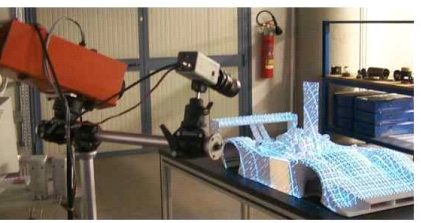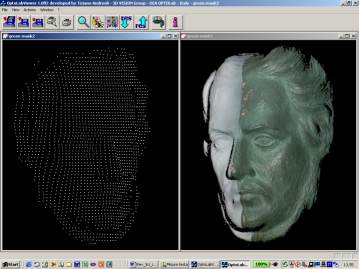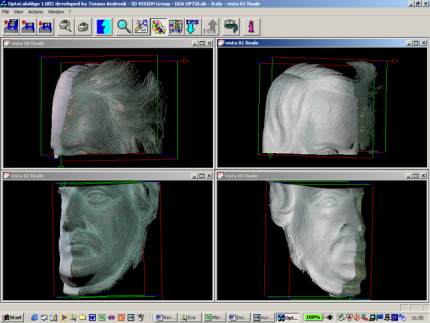
From 2004 to 2007 a number of students have done projects and hands-on practice in the Laboratory with photogrammetry. The main goal was to understand pros and cons with respect to active vision: as such, 2D and 3D vision has been studied and used to perform measurments and to reconstruct real world scenes using industrial hardware.
A brief presentation of the activities carried out in the Laboratory during these years can be downloaded below.