
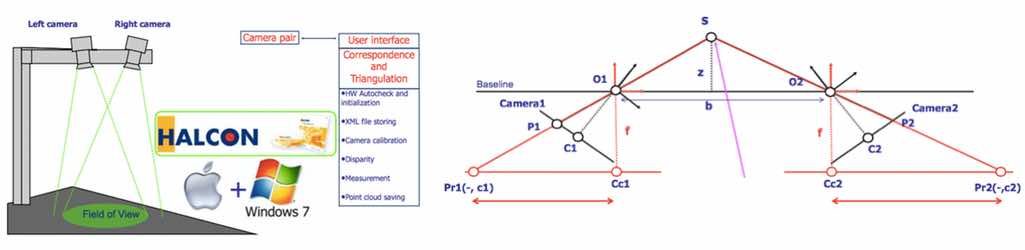
This project deals with the design, the development and the characterization of a vision system based on passive stereo vision, using the Halcon 9.0 (MVTech) suite of functions for 3D vision. The measurement procedures have been developed in the VISUAL BASIC.NET platform. Special care has been dedicated to devop a flexible software tool, denominated CHAMALEONEYES, which allows the user to automatically unload the cameras, and to calibrate them in a fast and easy way.
Special panels are available to check the hardware status, to load new camera models, and to test them. The tool outputs the point cloud corresponding to the field of view acquired by the cameras.