Robot technology has evolved significantly in the past decade, technologies ranging from mechatronics to sensing, manipulation and mobility have all contributed to this evolution.
Robots are currently deployed in a wide spectrum of applications domains, spanning from Manufacturing, to Healthcare, to Agriculture, to Transport and Logistics and Consumer-end domains.
The activity developed at the Laboratory impact on the Manufacturing and the Healthcare domains. The Robo3DScan project, the Optoranger system and the Barman system are examples of how industrial robotic cells can be improved in flexibility, interaction ability and manipulation ability. The Smart Gym and the Rewalk projects are examples of applications where rehabilitation robots can be used for delivering healthcare: these two can be viewed in the Biomechanics page.
One of the recent interests of the Laboratory is the Industry 4.0 paradigm, in which smart manufacturing is a key concept: it expresses the evolution of the manufacturing enterprises toward a very high level of interconnection and cooperation of their resources. Both Information Technologies (IT) and Operational Technologies (OT) will contribute to develop very high integration at all levels inside the factory. Among the OT, those concurrent to increase the efficiency and spread of advanced automation are of interest at the levels of production, maintenance and quality control for their smart implementation.
Vision systems and image processing tools are very promising in this context, along with Artificial Intelligence algorithms that have recently faced an increased attention. Recent developments are in the directions of miniaturizing the vision components and increasing their affordability, in view of embedding and connecting them for a number of applications in process control, robotics and human-machine interaction.
Hands-Free v2 to teleoperate robotic manipulators: three axis precise positioning study
Analysis and development of a teleoperation system for cobots based on vision systems and hand-gesture recognition
Project Hands-Free presented at Ubiquitous Robotics 2020
Project “RemindLy” participating in the HRI Student Competition!
Real-Time robot command system based on hand gestures recognition
Vision and safety for collaborative robotics
Gesture control of robotic arm using the Kinect Module

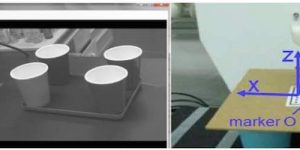
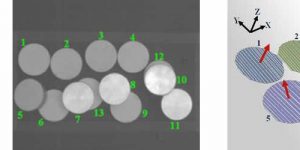
Optoranger: a 3D pattern matching method for bin picking applications
The Robo3DScan Project