The Vis4Mechs group, as usual, participated at the annual national meeting of electrical and electronics measurments and mechanical and thermal measurments, the GMEE-GMMT Forum which was held in Perugia this year.
The group presented the following works:
Validazione di algoritmi di calibrazione estrinseca basati su skeletonization del corpo umano – Presentation by Ing. Simone Pasinetti (GMMT)
Misura delle fasi del passo tramite algoritmi di Machine Learning durante camminate in esterna assistite da esoscheletro – Poster presentation
Ing. Simone Pasinetti had also the honor to present the work carried out in collaboration with the University of Trento, in loving memory of Alberto Fornaser:
Gait phase classification using the Sigma-Z Random Forest classifier – Presentation by Ing. Simone Pasinetti (joint session GMEE-GMMT)
Our joint Laboratory of Mechanical and Thermal Measurments also presented the following works:
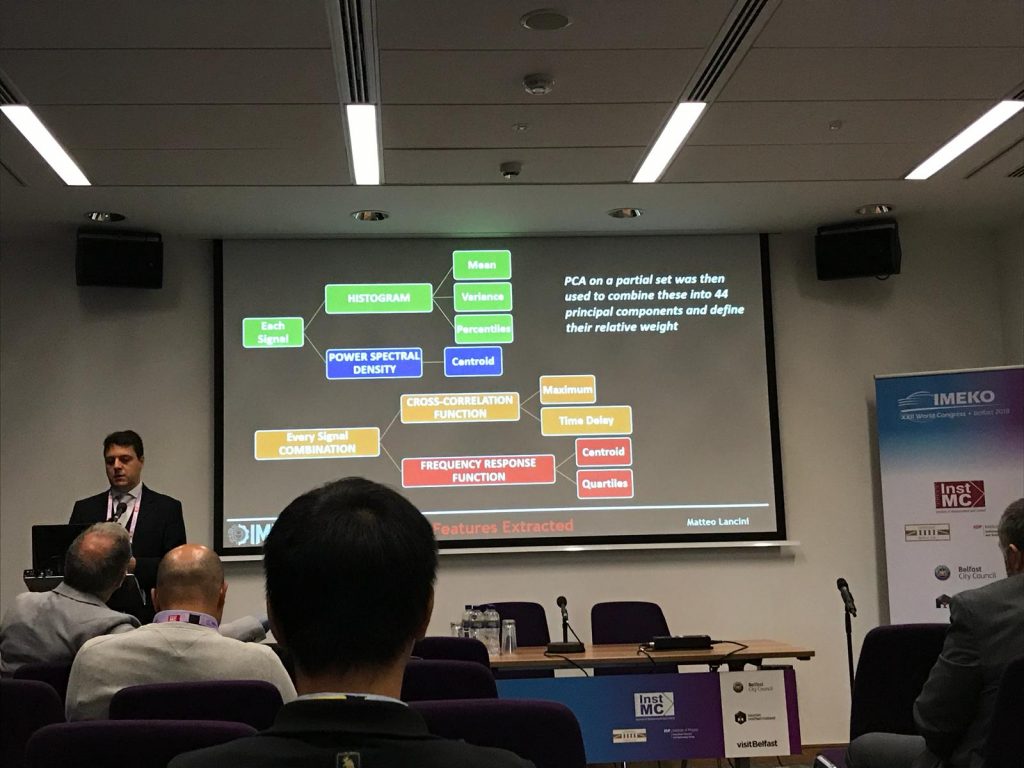
Measurments in support of exoskeleton assisted walking: the EUROBENCH BULLET Project – Presentation by Prof. Matteo Lancini (GMMT)
Development of a measuring system for clay target shooting discipline – Presented by Ing. Massimiliano Micheli (GMMT)
A group photo of the leading Professors involved in the EUROBENCH/BULLET Project: Mariolino De Cecco (Trento), Matteo Lancini (Brescia) and Francesco Crenna (Genova)
The Social Dinner of this year was held at the famous restaurant "Posta del Donini"
Congratulations to our team for winning the Best Paper Award for the paper “Qualification of Additive Manufactured Trabecular Structures Using a Multi-Insutrumental Approach” presented at the 2019 IEEE International Instrumentation and Measurment Technology Conference!
This research is part of a Progetto di Ricerca di Interesse Nazionale (PRIN) carried out in collaboration with the University of Brescia, the University of Perugia, the Polytechnic University of Marche and the University of Messina.
Rapid prototyping, known as 3D printing or Additive Manufacturing, is a process that allows the creation of 3D objects by depositing material layer by layer. The materials used vary: plastic polymers, metals, ceramics or glass, depending on the principle used by the machine for prototyping, such as the deposit of the molten material or the welding of dust particles of the material itself by means of high-power lasers. This technique allows the creation of particular objects of extreme complexity including the so-called “trabecular structures“, structures that have very advantageous mechanical and physical properties (Fig. 1). They are in fact lightweight structures and at the same time very resistant and these characteristics have led them, in recent years, to be increasingly studied and used in application areas such as biomedical and automotive research fields.
Despite the high flexibility of prototyping machines, the complexity of these structures often generates differences between the designed structure and the final result of 3D printing. It is therefore necessary to design and build measuring benches that can detect such differences. The study of these differences is the subject of a Progetto di Ricerca di Interesse Nazionale (PRIN Prot. 2015BNWJZT), which provides a multi-competence and multidisciplinary approach, through the collaboration of various universities: the University of Brescia, the University of Perugia, the Polytechnic University of Marche and the University of Messina.
The aim of this thesis was to study the possible measurement set-ups involving both 2D and 3D vision. The solutions identified for the superficial dimensioning of the prototyped object (shown in Fig. 2) are:
a 3D measurement set-up with a light profile sensor;
a 2D measurement set-up with cameras, telecentric optics and collimated backlight.
In addition, a dimensional survey of the internal structure of the object was carried out thanks to to a tomographic scan of the structure made by a selected company.
Fig. 1 - Example of a Trabecular Structure.
Fig. 2 - The prototyped object studied in this thesis.
The 3D measurment set-up
The experimental set-up created involved a light profile sensor WENGLOR MLWL132. The object has been mounted on a micrometric slide to better perform the acquisitions (Fig. 3).
The point cloud is acquired by the sensor using a custom made LabView software. The whole object is scanned and the point cloud is then analyzed by using PolyWorks. Fig. 4 shows an example of acquisition, while Fig. 5 shows the errors between the point cloud obtained and the CAD model of the object.
Fig. 3 - 3D experimental set-up.
Fig. 4 - Example of acquisition using the light profile sensor.
Fig. 5 - Errors between the measured point cloud and the CAD model.
The 2D measurment set-up
The experimental set-up involving telecentric lenses is shown in Fig. 6. Telecentric lenses are fundamental to avoid camera distorsion especially when high resolution for low dimension measurments are required. The camera used is a iDS UI-1460SE, the telecentric lenses are an OPTO-ENGINEERING TC23036 and finally the retro-illuminator is an OPTO-ENGINEERING LTCLHP036-R (red light). In this set-up a spot was also dedicated to the calibration master required for the calibration of the camera.
The acquisitions obtained have some differences according to the use of the the retro-illuminator. Fig. 7, 8 and 9 show some examples of the acquisitions conducted.
Finally, the measured object was then compared to the tomography obtained from a selected company, resulting in the error map in Fig. 10.
Fig. 6 - 2D experimental set-up.
Fig. 10 - Error map obtained comparing the measured object to the tomography.
If you are interested in the project and want to read more about the procedure carried out in this thesis work, as well as the resulting measurments, download the presentation below.
The aim of this project is to create a remote control system for a robotic arm controlled by using the Kinect v2sensor, to track the movements of the user arm, without any additional point of measurement (marker-less modality).
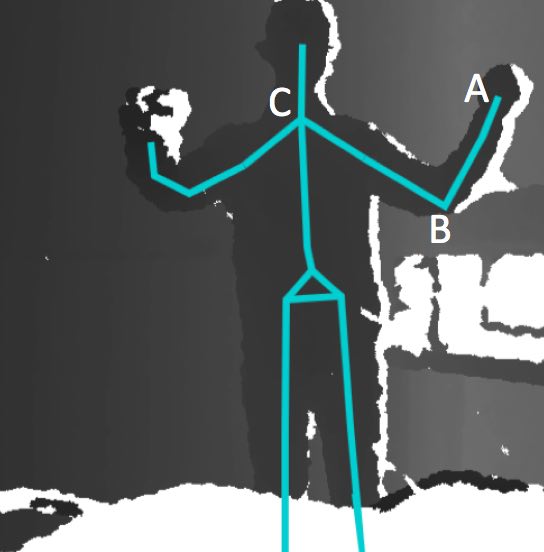
The Kinect camera acquires a 3D point cloud of the body and a skeleton representation of the gesture/pose is obtained using the SDK library software provided by the Kinect. The skeleton joints are tracked and used to estimate the angles.
Figure 1 - The point cloud acquired by the Kinect, and the skeleton. Points A, B, and C are the joints.
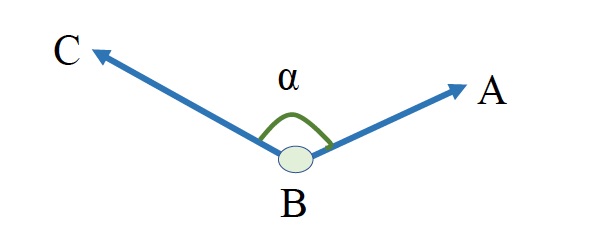
Point A is the joint of the wrist, point B is the joint of the elbow and point C is the joint of the shoulder. In the three dimensional space, vectors BA and BC are calculated with using the space coordinates of points A, B and C, which are taken from the skeleton. Angle α is calculated by using the dot product of the two vectors.
The software has been developed in C# inVisual Studio 2015.
Subjects with complete spinal cord injury (SCI) experience several limitations in their daily activities. Rehabilitative gait training by means of powered gait orthosis (PGO) has been shown to decrease the risk of secondary pathologies (e.g. skin injuries, osteoporosis, cardiovascular issues) and can significantly improve the quality of life, provided that they are used on a regular basis and in the correct way. The traditional training is based on three steps: gait trial, data analysis, and gait correction. Gait is monitored using force platforms and dedicated instrumentation directly applied to the patient (EMGs, IMUs, markers). These devices require time to be positioned and care by the patient while walking. Data analysis and gait correction are totally dependent on the therapist experience. The process must be performed in specialized centers and is very time consuming. This leads to a high cost for the community health services.
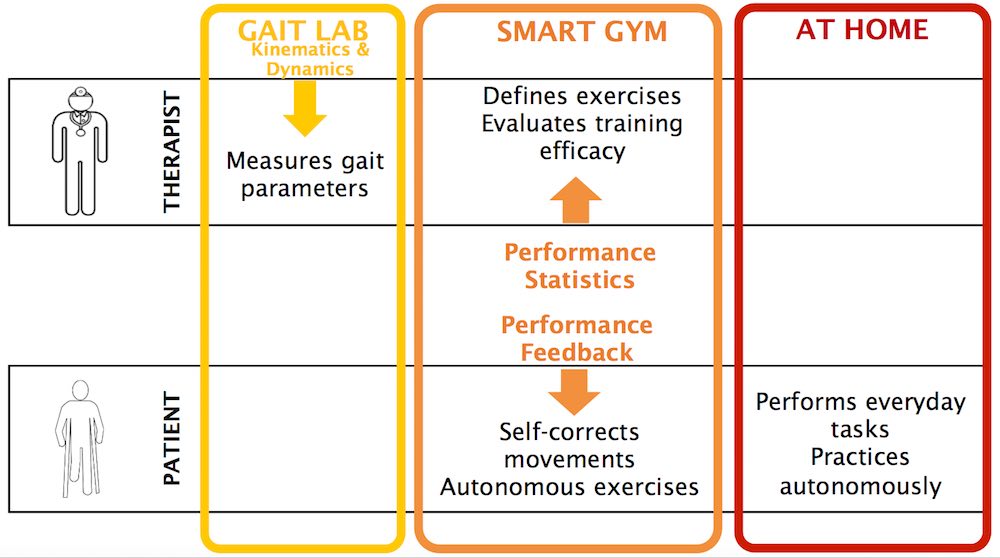
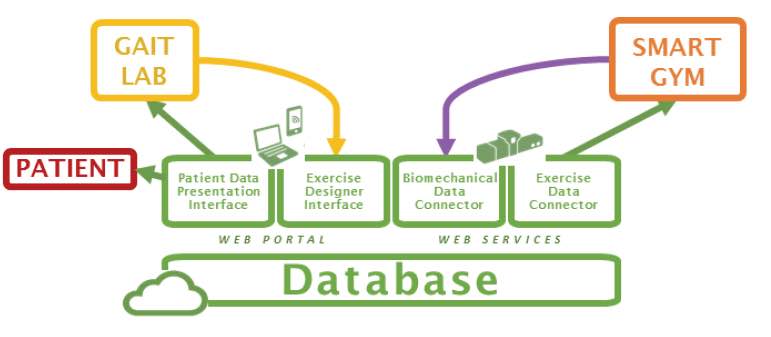
Costs and efforts needed for longer training sessions could be reduced by the availability of a SMART GYM environment to:
provide real-time feedback directly to the patient about his/her gait performance;
provide information to clinicians and therapists to remotely monitor the patient;
involve the patient in personalized gait exercises depending on his/her performance in time;
allow the patient to train on his/her own, along paths longer than those permitted by the limited room available in gait laboratories.
Figure 1 - The smart gym objectives.
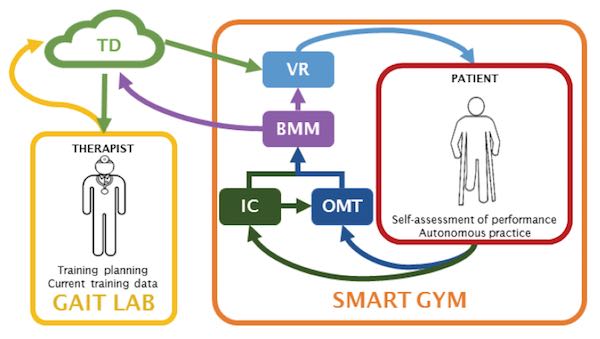
The SMART GYM components
BMM (BioMechanical Model):this component evaluates patient posture and motion in real time. The BMM is fed with (i) the spatiotemporal gait parameters, (ii) the kinematics of the lower limbs, and (iii) the kinematics of the upper limbs;
IC (Instrumented Crutches): this system is specifically designed measure the kinematics of the lower limbs and the spatiotemporal gait parameters;
OMT (Optical Motion Tracking): this system estimates the upper limb kinematics using a suitable set of Kinect devices;
VR (Virtual Reality): this system carries out the self-training of the patient;
TD (Therapist Dashboard): a dedicated software service that collects the data from BMM and allows the therapist to follow the patient progress remotely, an to plan new train patterns.
Figure 2 - The SMART GYM components.
Figure 3 - The therapist dashboard architecture.
Novelty of the Project
The IC system, based on “A Vision System that walks with the patient” (challenging, but very promising);
The OMT based on multiple Kinect devices is new with respect to state of the art, since most applications are performed using a single device.
The combination of the OMT in the VR system will lead to the realization of a novel human machine interface, able to accurately render the posture of the whole body.
The paradigm of adaptiveness that lays under the BMMsystem is novel, as it requires new approaches to the estimate of the gait and posture indices.
The smart gym project is highly interdisciplinary: knowledge and expertise from the mechanical and the electronic measurement community will allow the development of either sensors (both contact and contact-less), models (both in the biomechanics and in the artificial vision contexts), measurement procedures, virtual reality scenarios and clinical experimentation, which will be fused together and integrated using ICT technologies. This aspect well fits one of the most significant Horizon 2020 priority, i.e., transversality.
Impact of the Project
The SMART GYM represents a new environment where the patient can practice autonomously and yet under the therapist control;
The SMART GYM will reduce community costs;
The SMART GYM will be valuable for elderly people;
The SMART GYM will be valuable even for healthy people.
This project focuses on the e-manufacturing of complex parts by integrating smart additive manufacturing technologies to more traditional manufacturing processes, in view of obtaining sustainable, flexible, completely automatic and fast manufacturing (SMART MANUFACTURING).
The project is funded by the POR FESR 2014-2020: Linea R&S per Aggregazioni 2015 Regione Lombardia, and involves SMEs and Research Laboratories in strong cooperation to demonstrate the feasibility of producing industrial manufacts in the automotive industry.
The role of the laboratory is the study and the implementation of vision tools for the on-line control of the manufacturing process based on the additive approach.
The accurate and timely monitoring of hypertension-related diseases is important for a population screening and follow up, to prevent the onset and to assure proper treatment. The evaluation of morphological characteristics of small resistance arteries in human beings in not easy. The gold standard is generally considered the evaluation of the media to lumen ratio of subcutaneous small vessels obtained by local biopsies and measured by wire or pressure micromyography.
However, non-invasive techniques for evaluation of retinal arterioles were proposed, in particular two approaches seem to provide interesting information: scanning laser Doppler flowmetry and adaptive optics; both of them provide an estimation of the wall to lumen ratio (WLR) of retinal arterioles.
The Laboratory is involved in the assessment of the efficiency and efficacy of a recently developed non invasive diagnostic instrument, able to provide high-quality images of the retina, by means of adaptive optics. In collaboration with the Chair of Internal Medicine of the University (Prof. D. Rizzoni), the instrument and its software are tested for accuracy and repeatability on artificial vessel models, and on a database of subjects.
Based on the data collected so far, the instrument performs in a quite satisfactory way as compared to the previously used techniques.
Rizzoni, D.; Agabiti Rosei, C.; De Ciuceis, C.; Semeraro, F.; Rizzoni, M.; Docchio, F. “New Methods to Study the Microcirculation“, American Journal of Hypertension, Vol 31, Issue 3, pp 265–273. 2018
Nardin, M.; Coschignano, M. A.; Rossini, C.; De Ciuceis, C.; Caletti, S.; Rizzoni, M.; Docchio, F.; Porteri, E.; Rizzoni, D. “Methods of evaluation of microvascular structure: state of the art“, European Journal of Translational and Clinical Medicine, Vol 1, pp 7-17. 2018
OPL-3D has been specifically designed for applications of reverse engineering and rapid prototyping, as well as for applications of measurement and quality control.
The system exploits active stereo vision (the absolute approach is implemented) using time-multiplexing based on the Gray-Code-Phase-Shifting method.
The projector-camera pair
OPL-3D can host a wide variety of projectors. In the left figure in Fig. 1 the device is the ABW LCD 320: it is a microprocessor-controlled and column-driven projector, specifically intended to be used in this class of systems. Alternatively, those devices currently available for video projection can be succesfully used, as that one shown on the right figure in Fig. 1 (Kodak DP 900, based on DLP technology).
The detector is a commercial CCD video camera. In the configurations shown in Fig. 1, the camera is an inexpensive colour Hitachi KP D50, with standard resolution (752 x 582 px). However, any type of camera (black/white or colour, with single or multiple CCDs for colour separation, and with different pixel densities) can be mounted on the system, depending on the application and on the projector used. In Fig. 2, for example, a 1300 x 1030 px digital video camera (Basler model) is mounted, to acquire at the required resolution large fields of views
The mount
The projector and the camera are mounted onto a rigid bar, that can be easily moved around the scene by means of a tripod, and that holds the adjustment units for proper orientation. The mount is fully reconfigurable: all parameters can be varied according to the distance from the target, the required measurement resolution and the FoV (Fig. 3).
Given the fact that through sophisticated calibration procedures the system is able to finely estimate the operating parameters, no accurate positioning equipment (micropositioners, microrotators) is required, the only requirement being stability of the mount during the measurement procedure.
Fig. 4 shows two examples of on-site measurements of complex shapes where the full flexibility of the system was mandatory to perform the acquisition.
Fig. 3 - Images of the tripods used and of the equipment of the prototype.
Fig. 4 - Two on-site acquisition campaigns carried out by the Laboratory: the Winged Victory point cloud acquisition (left) and the Ferrari point cloud acquisition (right).
The electronic hardware
OPL-3D is equipped with a PC, that has the purpose of (i) driving the projector with the appropriate pattern sequence, (ii) acquiring the image sequences from the target, and (iii) elaborating the images. In addition, it contains all the features to perform sophisticated procedures for setting up and reconfiguration.
The PC is in the current configuration a Pentium III 900 MHz, 1 GB Ram, equipped with a Matrox Meteor II Frame Grabber. The Projector is operated by the PC through the Serial Connector.
PERFORMANCE
OPL-3D exhibits low-measurement uncertainty (120 mm) over large measurement areas (450 x 340 mm), linearly scalable in the case of smaller areas. Special care has been devoted to flexibility of use, in-field measurement setting, reconfigurability and robustness against environmental light changes and surface colour and texture.
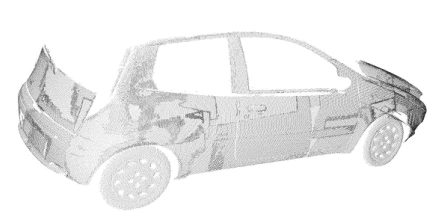
Fig. 5 shows the acquisition of the blue car already seen in Fig. 2. Multiview alignment and registration is performed by either purposely designed software or by means of commercially available products, depending on the complexity of the process.
Fig. 5 - Point Cloud obtained with every acquisition aligned to form a complete and dense reconstruction.
Technology transfer
OPL 3-D has been put into the market by Open Technologies s.r.l., Italy, a start-up company of the University of Brescia, under the Trade Name of 3DShape, in a manifold of versions, including sophisticated software for multi-view combination, point cloud manipulation and transformation, up to surface generation.