The aim of this project is to create a remote control system for a robotic arm controlled by using the Kinect v2sensor, to track the movements of the user arm, without any additional point of measurement (marker-less modality).
The Kinect camera acquires a 3D point cloud of the body and a skeleton representation of the gesture/pose is obtained using the SDK library software provided by the Kinect. The skeleton joints are tracked and used to estimate the angles.
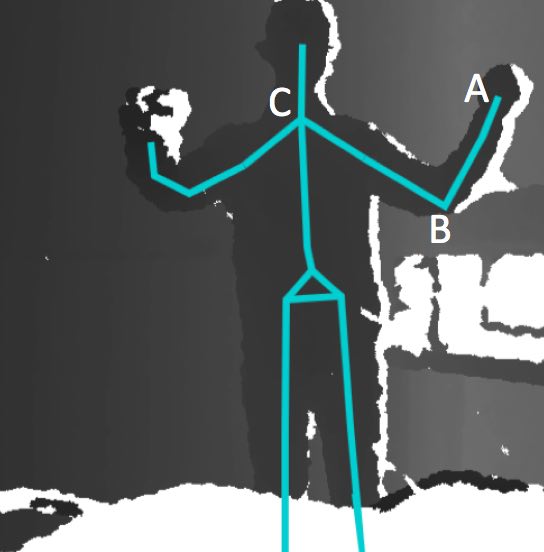
Figure 1 - The point cloud acquired by the Kinect, and the skeleton. Points A, B, and C are the joints.
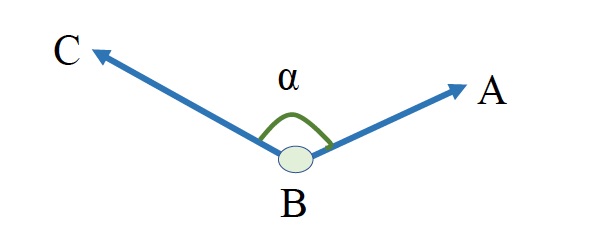
Point A is the joint of the wrist, point B is the joint of the elbow and point C is the joint of the shoulder. In the three dimensional space, vectors BA and BC are calculated with using the space coordinates of points A, B and C, which are taken from the skeleton. Angle α is calculated by using the dot product of the two vectors.
The software has been developed in C# inVisual Studio 2015.
In this work, a vision system specifically designed to monitor the labels on bottling lines for wine production industries is presented. The system is based on smart cameras, Real Time LabView sofware and IMAQ vision libraries. The work has been developed in the frame of a thesis work, in collaboration with Studio Progetti Automation srl (Italy).
Bottling lines for wine are complex systems, which provide bottle rinsing, filling, capping, labelling, wrapping and pallettising. In this work, a vision system has been studied and implemented for the automatic control of the labelling machine. The bottling line, that is installed at Cantine Leonardo da Vinci (Tuscan, Italy), is characterized by a high level of automation, and is able to output 10.000 bottles per hour. However, the labeling machine is completely operator-dependant: three blocks of labels must be manually positioned on the machine for each wine brand. These are the front label, the back label and the DOCG label. The position of the labels with respect to the bottles is visually controlled and adjusted by the operators.
Due to human errors, it is possible that the operator mount on the machine labels corresponding to a wine brand different with respect to the one programmed on the bottling line. Early detection of this situation is mandatory to reduce downtime and, in the worse case, to avoid that the whole bottling process is performed from scratch.
This work has been carried out in the frame of a thesis work, in the year 2004-2005. The aim was to understand the feasibility of using a Time of Flight scanner for the documentation of crime scenes, in view of their study and analysis in subsequent times.
In this thesis project the two students involved (Marco Scalvenzi and Gianluca Cavagnini) had the opportunity of using the Vivid 910 laser scanner to document 3D crime scenes at different resolution levels.
It was really interesting to capture medium range details, such as the injury tools and body parts, as well as short range details, like bullet holes, skin lesions, and blood patterns.
A numer of experiences have been performed both in indoor and in outdoor environments. The flexibility, the portability and the ease of use of this system revealed very precious to complete the projects.