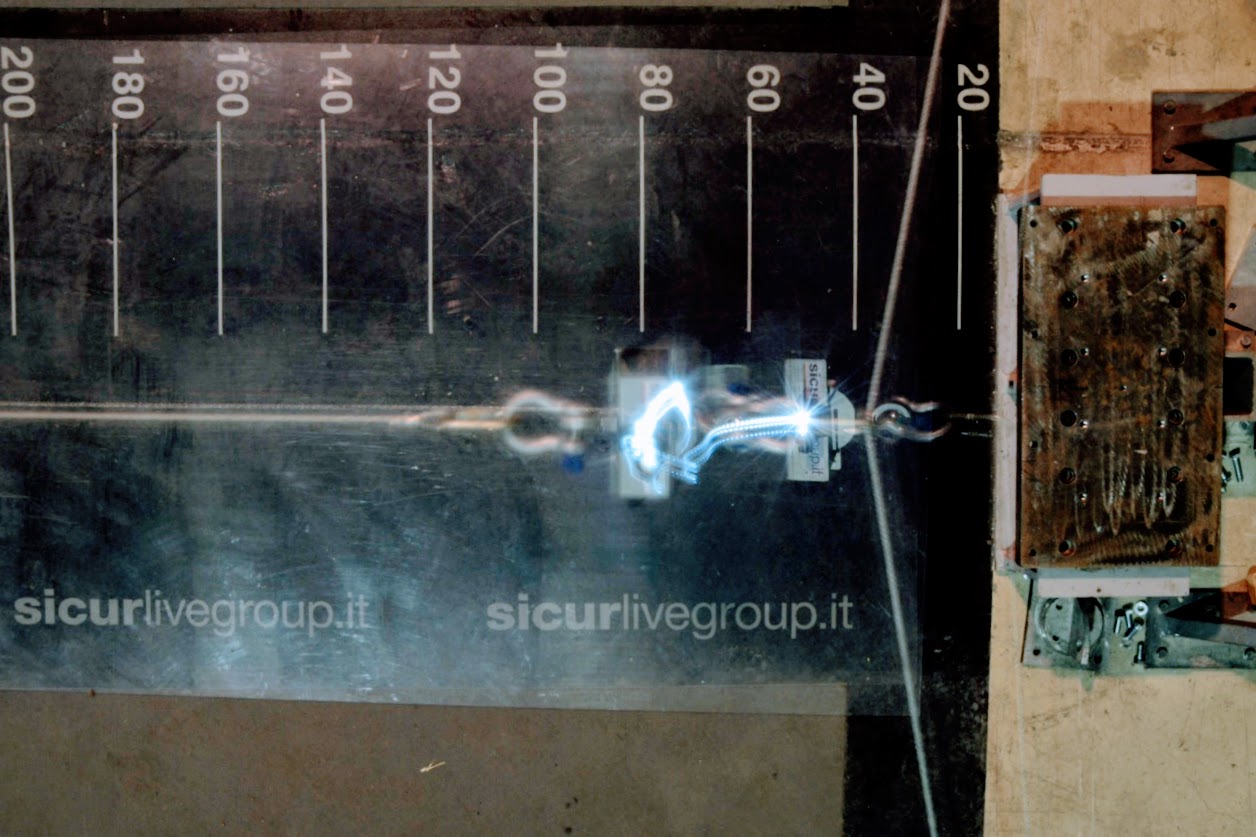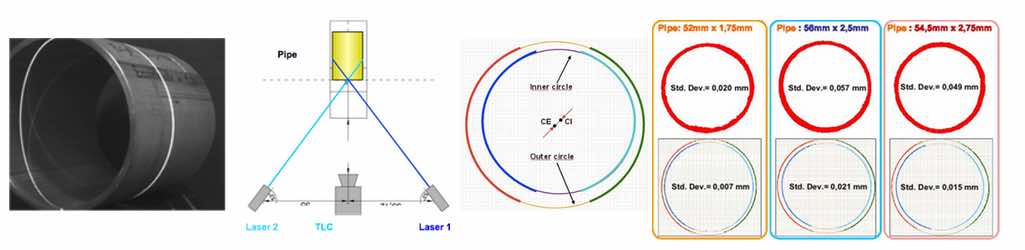
The aim of this project has been to design, to implement and to characterize a system for the 3D measurement of eccentricity of pipes.
This system was originally based on four laser slits, suitable oriented with respect to the pipe to acquire the external and the internal semi-profiles. In order to develop a compact version of the instrument, we studied a new optical layout, which halves the number of the cameras.
Related Publications
Sansoni, G.; Bellandi, P.; Docchio, F. “Design and development of a 3D system for the measurement of tube eccentricity“, Measurement Science and Technology, Vol. 22, no. 7. 2011
Sansoni, G.; Bellandi, P.; Docchio, F. “3D system for the measurement of tube eccentricity: an improved, rugged, easy to calibrate layout“, Measurement Science and Technology, Vol. 24, no. 3. 2013