In recent years there has been a significant increase in the development of walking aid systems and in particular of robotic exoskeletons for the lower limbs, used to make up for the loss of walking ability following injuries to the spine (Fig. 1).
However, in the initial training phase the patient is still forced to use the exoskeleton in specialized laboratories for assisted walking, usually equipped with vision systems, accelerometers, force platforms and other measurement systems to monitor the patient training (Fig. 2).
Fig. 1 - Example of a patient wearing the ReWalk exoskeleton. The crutches are needed as aid for the patients, since they tend to tilt forward when using the exoskeleton.
To overcome the limitations given by both the measuring environment and the instruments themselves needed, the University of Brescia joined forces with other research laboratories and created a pair of instrumented wireless crutches able to assess the loads on the upper limbs through a suitable biomechanical model that measures the load exchanged between the soil and the crutch.
In addition to providing a great help to the physiotherapist for the assessment of the quality of walking and reduce the risk of injury to the upper limbs due to the use of the exoskeleton, the real advantage of the developed device lies in the fact that it is totally wireless, allowing its use in external environments where the user can feel more comfortable. It is in fact known in the literature that the behavior of a subject during a walk varies depending on the environment in which it is performed, both because of the space limitations and of the range of the measurment instrumentation, which limits the trajectory the patient performs in a laboratory compared to the one performed outdoors without strict limitations.
It is also important to relate and evaluate the measured quantities by averaging them on a percentage basis associated with the phases of the step instead of time, in order to compare them with the physiological behavior of the subject, usually related to the phases of the step (swing and stance, Fig. 3).
Fig. 3 - Detail of a gait cycle: the stance phase is when the foot is placed forward, the swing phase is when the foot kicks off the ground moving the body forward.
STEP 1: Instrumented wireless crutches design
A first prototype of instrumented crutches was already been developed to measure the upper limbs forces. In this project, however, we wanted to create a new prototype able to measure and predict the gait phases without the need of an indoord laboratory. To do this, we mounted two Raspberry Pi on the crutches and two PicoFlexx Time of Flight cameras which will see the feet while walking (Fig. 4 and 5).
Fig. 4 - Detail of the proposed instrumented crutches. The two Raspberry Pi send the acquired images to an Ubuntu PC wireless.
Fig. 5 - (1) PicoFlexx ToF cameras, (2) Raspberry Pi boards, (3) powerbanks for the Raspberry Pi boards.
STEP 2: Supervised Machine Learning algorithm for gait phases prediction
We choose a supervised algorithm (Decision Trees) to predict the gait phases according to the depth images of the feet acquired during the walking.
Each image was processed offline to (i) perform a distance filtering, (ii) calculate and fit a ground plane according to the measured one and (iii) calculate the distance between the ground plane and the feet. The latter values are used as features for the algorithm (Fig. 6 and 7).
Fig. 6 - Detail of the supervised algorithm of choice: a set of features are selected and used for the training of the model, which is then used to predict the gait phases.
Fig. 7 - Detail of the processing of the images needed to extract the features used by the model.
STEP 3: Experiments
The proposed system has been tested on 3 healthy subjects. Each subject has been tested on a walk indoor and on a walk outdoor, different for every subject.
For each subject we trained a model specific for the person. This choice was driven by the fact that every person walks in its way, so it is best to comprehend its specific style and use it to monitor its performances while walking.
To learn more about the project and to view the results, feel free to download the presentation below!
Subjects with complete spinal cord injury (SCI) experience several limitations in their daily activities. Rehabilitative gait training by means of powered gait orthosis (PGO) has been shown to decrease the risk of secondary pathologies (e.g. skin injuries, osteoporosis, cardiovascular issues) and can significantly improve the quality of life, provided that they are used on a regular basis and in the correct way. The traditional training is based on three steps: gait trial, data analysis, and gait correction. Gait is monitored using force platforms and dedicated instrumentation directly applied to the patient (EMGs, IMUs, markers). These devices require time to be positioned and care by the patient while walking. Data analysis and gait correction are totally dependent on the therapist experience. The process must be performed in specialized centers and is very time consuming. This leads to a high cost for the community health services.
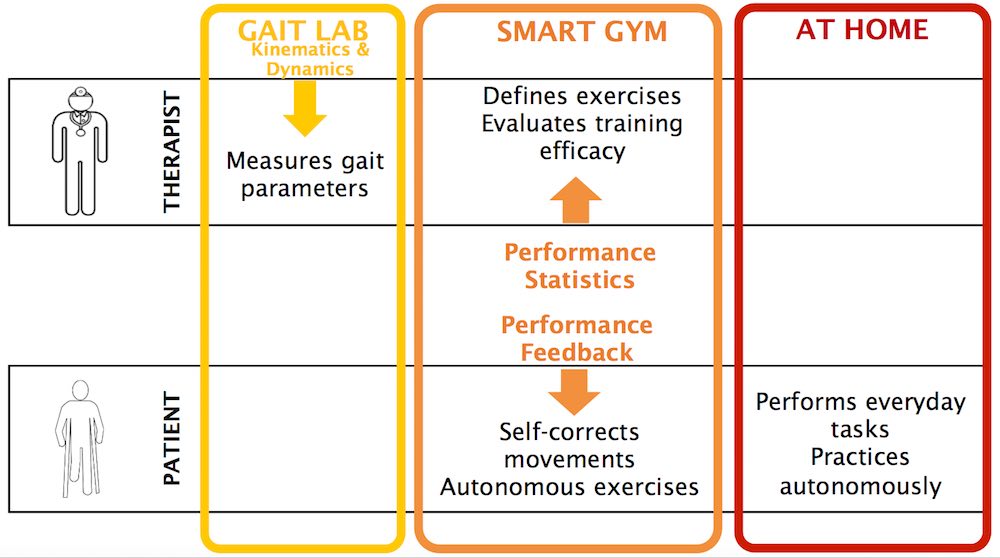
Costs and efforts needed for longer training sessions could be reduced by the availability of a SMART GYM environment to:
provide real-time feedback directly to the patient about his/her gait performance;
provide information to clinicians and therapists to remotely monitor the patient;
involve the patient in personalized gait exercises depending on his/her performance in time;
allow the patient to train on his/her own, along paths longer than those permitted by the limited room available in gait laboratories.
Figure 1 - The smart gym objectives.
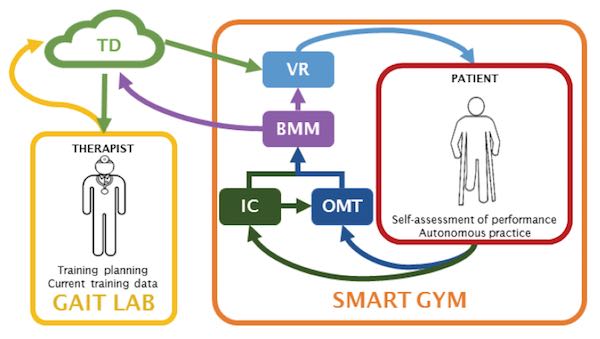
The SMART GYM components
BMM (BioMechanical Model):this component evaluates patient posture and motion in real time. The BMM is fed with (i) the spatiotemporal gait parameters, (ii) the kinematics of the lower limbs, and (iii) the kinematics of the upper limbs;
IC (Instrumented Crutches): this system is specifically designed measure the kinematics of the lower limbs and the spatiotemporal gait parameters;
OMT (Optical Motion Tracking): this system estimates the upper limb kinematics using a suitable set of Kinect devices;
VR (Virtual Reality): this system carries out the self-training of the patient;
TD (Therapist Dashboard): a dedicated software service that collects the data from BMM and allows the therapist to follow the patient progress remotely, an to plan new train patterns.
Figure 2 - The SMART GYM components.
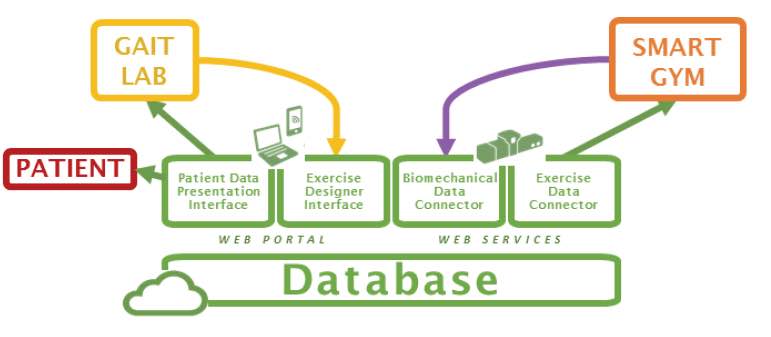
Figure 3 - The therapist dashboard architecture.
Novelty of the Project
The IC system, based on “A Vision System that walks with the patient” (challenging, but very promising);
The OMT based on multiple Kinect devices is new with respect to state of the art, since most applications are performed using a single device.
The combination of the OMT in the VR system will lead to the realization of a novel human machine interface, able to accurately render the posture of the whole body.
The paradigm of adaptiveness that lays under the BMMsystem is novel, as it requires new approaches to the estimate of the gait and posture indices.
The smart gym project is highly interdisciplinary: knowledge and expertise from the mechanical and the electronic measurement community will allow the development of either sensors (both contact and contact-less), models (both in the biomechanics and in the artificial vision contexts), measurement procedures, virtual reality scenarios and clinical experimentation, which will be fused together and integrated using ICT technologies. This aspect well fits one of the most significant Horizon 2020 priority, i.e., transversality.
Impact of the Project
The SMART GYM represents a new environment where the patient can practice autonomously and yet under the therapist control;
The SMART GYM will reduce community costs;
The SMART GYM will be valuable for elderly people;
The SMART GYM will be valuable even for healthy people.
The objective of this research activity is to analyze and model the behavior of ReWalk™exoskeletons during SCI patients training.
Powered exoskeletons can be used by persons with complete spinal cord injury (SCI) to achieve bipedal locomotion. The training required before being able to efficiently operate these orthotics, however, is currently based on subjective assessments of the patient performance by his therapist, without any quantitative information about internal loads or assistance level. To solve this issue, a sensor system was developed, combining traditional gait analysis systems such as ground reaction force (GRF) platforms and motion capture systems, with instrumented Lofstrand crutches, created by our team.
To each crutch three strain-gauge bridges were applied, to measure both axial and shear forces, as well as conditioning circuits with transmission modules, a tri-axial accelerometer, and a power management circuit with two batteries. Data are transmitted wirelessly via Bluetooth to a personal computer, and every care was taken to avoid interfering with the user’s gait.
An inverse dynamics analysis, on a simplified biomechanical model of the subject wearing the exoskeleton, is then used to assess both the internal forces acting on shoulders, elbows and neck of the subject, as well as the loads acting on joints. The same analysis was also used to quantify the assistance provided to the user during walking, in terms of vertical forces applied by the therapist to the exoskeleton.
These information could be used to teach orthopedic patients to correctly use these supports and minimize problems connected to their usage, making easier for SCI patients to adopt these devices, and increasing their quality of life, while reducing the costs sustained by the community.
The objective of this research activity is to analyze and model the behavior of healthy subjects during equilibrium perturbations to understand how the posture strategies of a human subject changes from a static environment to a dynamic situation.
The balance function is a complex mechanism that involves, in particular, the nervous system. The diseases of the nervous system affect the structures involved in equilibrium with a consequent reduction in the capacity of gait and balance. Clinicians have different tools to characterize the instability. The most used is the static posturography, which assesses the balance from the registration of the position of the centre of pressure of the subject who is standing on a force platform.
The sensitivity of static posturography can be improved placing the subject in conditions of unstable equilibrium or stability limit and, thus, increasing the oscillation of the centre of pressure. This technique is defined as dynamic posturography, which measure the capability of the subject to maintain the balance during different test, performed on a motorized platform. Using vision systems and force platforms both the kinematic and the dynamic behaviour of the subject can be studied.
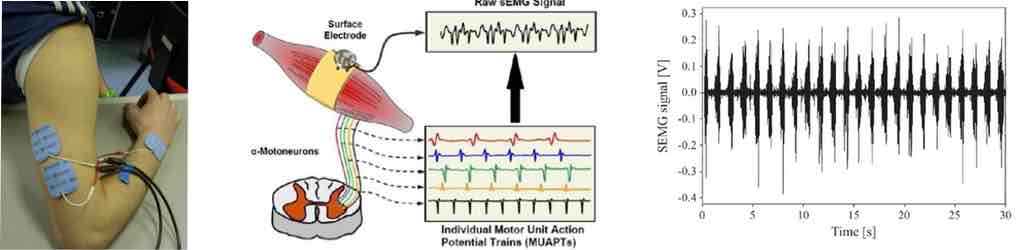
The aim of this research activity is to study and develop new automatic methods for the analysis of the SEMG signal to reduce the measurement variability and subjectivity and increase the quality of the medical diagnosis.
Surface electromyography (SEMG) is a widely used technique for the evaluation of posture and movement. The analysis of the SEMG signal can assess neuromuscular pathologies in medical disciplines such as neurology, neurophysiology, orthopedics and rehabilitation. Most common uses of SEMG signals are amplitude (or SEMG pattern) measurement or timing measurement.
SEMG analysis frequently requires the estimation of muscle activation timing, as in the case of the functional characterization of the human movement, or of the study of muscle synergies. Muscle timing detection could also be useful in amputated subjects, where the SEMG signal may be used for the control of prosthesis.
The most common method to analyze SEMG signal is still visual inspection, which strongly depends on the skills and the experience of the examiner and suffers from a high subjectivity.