Il corso di misure del MMTLab prevede lo svolgimento da parte degli studenti di esercitazioni pratiche su diverse tipologie di misurazioni tramite banchi di prova, sensori IMU e altre strumentazioni del laboratorio. I risultati ottenuti vengono validati tramite il confronto con i risultati di calcoli teorici, analizzando l’incertezza a priori o per campionamento.
Alcuni dei gruppi utilizzano uno shaker per tarare accelerometri, eseguire prove di fatiche a diverse frequenze e ampiezze d’onda con masse fluttuanti o stabilire la rigidezza dinamica di un oggetto disegnando le curve che descrivono il variare della sua frequenza naturale in funzione della temperatura.

Un progetto implica invece l’assemblamento e l’utilizzo del trifilar pendulum, uno strumento che misura l’inerzia di un cerchione. Per validare il lavoro è necessario fare delle prove con dati noti; in questo caso l’inerzia della piastra rotante, che serve da base, viene calcolata tramite formule e il risultato viene poi confrontato con i dati sperimentali. È possibile così stimare l’inerzia del cerchione calcolando il periodo di oscillazione del pendolo.
Altri gruppi studiano i dati ricavati da sensori opto-elettronici e IMU fissati su un fucile di TRAP durante un’esercitazione in campo per analizzare gli angoli di beccheggio e imbardata dell’arma durante il gesto atletico o stimare la traiettoria del proiettile utilizzando i dati esportati dai sensori (giroscopio, accelerometro, orientamento quaternioni).
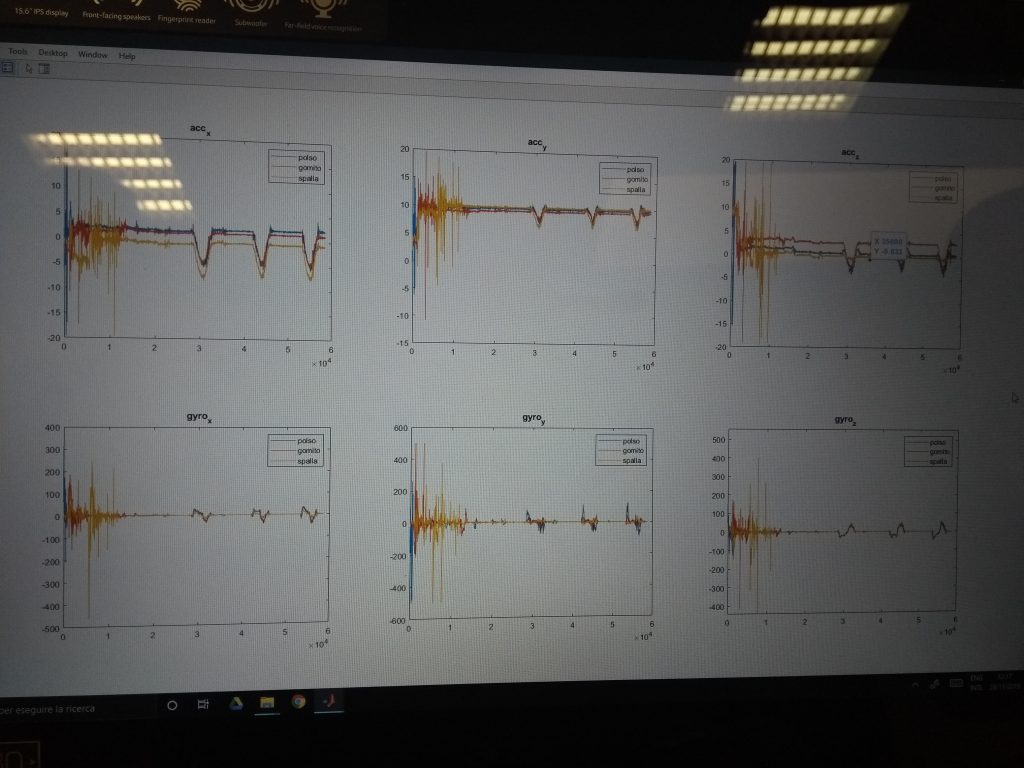
Sempre attraverso l’utilizzo di sensori IMU posizionati sui giunti del braccio (spalla, gomito, polso) è possibile stabilire le fasi di determinati movimenti oscillatori. Il programma deve riconoscere ed etichettare autonomamente il gesto svolto tramite un algoritmo Machine Learning.
Gli estensimetri, ovvero sensori che misurano la
deformazione di una superficie, vengono impiegati dagli studenti per determinare
il centro di pressione di un corpo tramite una pedana poggiata su quattro
piedini sui quali vengono applicati i sensori.
Un altro gruppo utilizza gli estensimetri sulle stampelle strumentate per misurare
la forza esercitata; il risultato verrà validato tramite piattaforme di forza o
trasduttori a sensibilità nota.

Alcuni studenti studiano la cinematica del robot collaborativo Sawyer per calcolare l’incertezza dei giunti facendogli assumere diverse posizioni.

Un gruppo indaga la ripetibilità della griglia sui supporti spinali con il laser e un algoritmo MATLAB che valida la ripetibilità attraverso la generazione di dati fittizi conosciuti a priori; altri valutano la ripetibilità delle curve di forza e spostamento di alcuni provini tramite banco di prova roto-assiale.