Cosmic radiation has been known since the first decades of the 20th century: before the era of accelerators, cosmic rays have been considered, for decades, the best source of projectiles to investigate the core of matter, from nuclei to elementary particles.
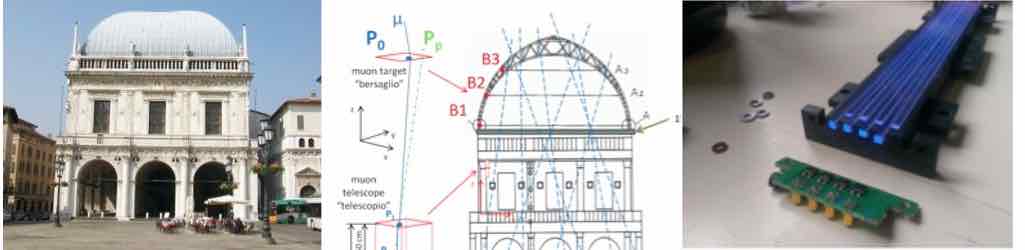
Due to their property of crossing very thick and non-transparent materials, cosmic rays appear as suitable tools for the realization of measurement systems, especially as helpful alternative to traditional optical systems, when detectors are not mutually visible.
An example of application of cosmic rays to monuments monitoring is presented in this post: it has been developed in collaboration with the Istituto Nazionale di Fisica Nucleare (INFN) and the Department of Industrial and Mechanical Engineering of the University of Brescia.
Related Publications
Bodini, I.; Bonomi, G.; Cambiaghi, D.; Magalini, A. “Cosmic ray detection based measurement systems: a preliminary study”, Measurement Science and Technology, Vol. 18, pp. 3537-3546. 2007
Zenoni, A.; Bonomi, G.; Donzella, A.; Subieta, M.; Baronio, G.; Bodini, I.; Cambiaghi, D.; Lancini, M.; Vetturi, D.; Barnabà, O.; Fallavollita, F.; Nardò, R.; Riccardi, C.; Rossella, M.; Vitulo, P.; Zumerle, G. “Historical building stability monitoring by means of a cosmic ray tracking system”, Proceedings of 4th International Conference on Advancements in Nuclear Instrumentation Measurement Methods and their Applications (ANIMMA 2015). 2015